

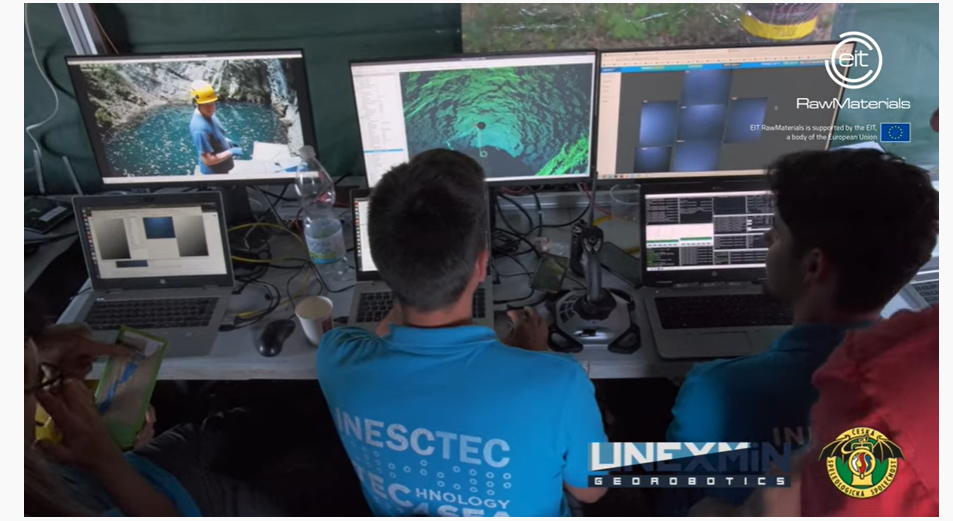
A equipa do Instituto de Engenharia de Sistemas e Computadores, Tecnologia e Ciência (INESC TEC) participou em agosto na missão do projeto UNEXUP, onde utilizou o robot para explorar a caverna natural mais profunda do mundo, conhecida como o “Abismo de Hranice”, localizada na República Checa. Pela primeira vez, um veículo autónomo subaquático chegou até aos 450 metros e foi possível fazer um mapa 3D e recolher dados de parâmetros da água.
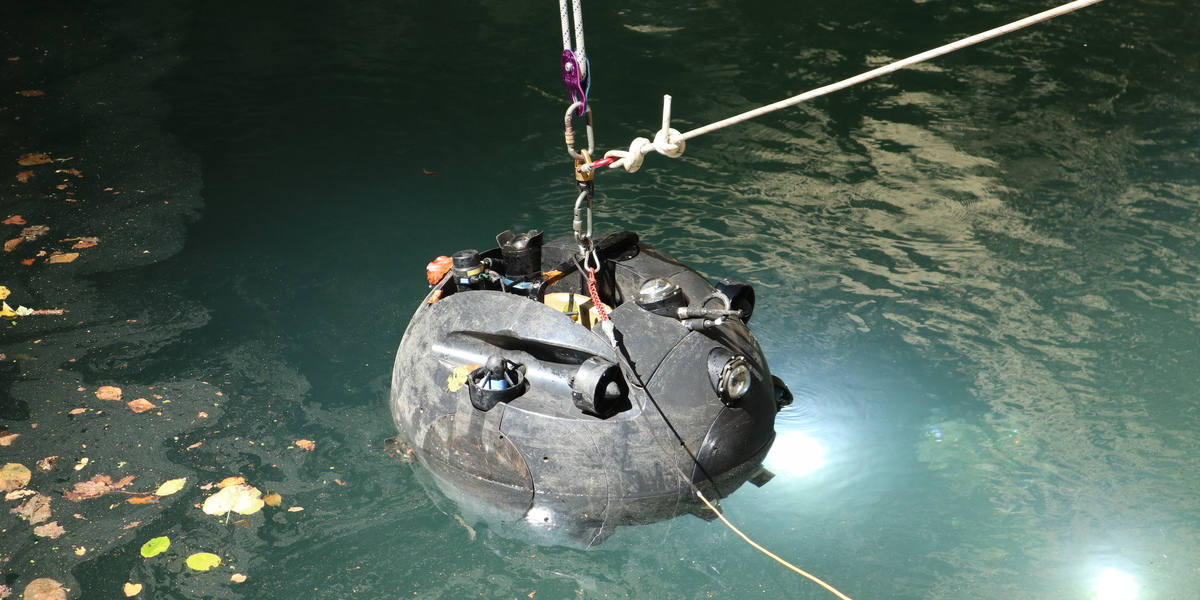
O UX-1Neo é considerado um dos robots subaquáticos tecnologicamente mais evoluídos do mundo e foi desenvolvido pelo INESC TEC, no âmbito do projeto UNEXUP. O veículo autónomo subaquático (em inglês AUV - Autonomous Underwater Vehicle), realiza missões de exploração de forma completamente autónoma, com um posicionamento preciso, características únicas que podem ser utilizadas dependendo da missão ou do seu risco.
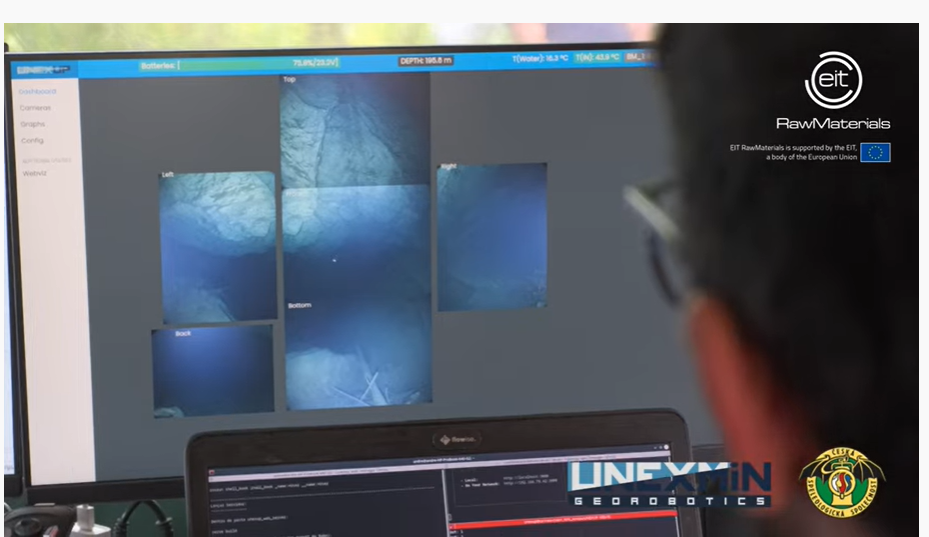
O instituto explica que o robot combina a informação de um sonar multifeixe, com dois sonares de varrimento rotativo, seis câmaras e seis sistemas de reconstrução tridimensional de luz estruturada, que permitem construir, com detalhe, um mapa 3D.
Veja as imagens da missão





Alfredo Martins, que é também docente no Instituto Superior de Engenharia do Porto (ISEP), adianta que “a caverna, que se julga ter mais de 900 metros de profundidade, tem sido explorada com recurso a mergulhadores, até aos 200 metros. O UX-1Neo conseguiu, em dois dias de mergulhos, mapear o que tem sido feito nos últimos 50 anos por mergulhadores.
Os mapas que antes existiam da da gruta foram construídos, ao longo dos anos, com base em medições retiradas por mergulhadores, que chegaram até 180 metros, e ainda com recurso a relatos de um mergulhador, que desceu até aos 217 metros, e de duas sondas acústicas que foram largadas com um cabo até aos 384 metros. O recorde anterior tinha sido alcançado em 2016, com recurso a um robot subaquático operado de forma remota, que atingiu 404 metros, numa expedição da National Geographic.
Veja o vídeo de resumo da missão UNEXUP
A missão de exploração foi organizada pela Associação Checa de Espeleologia e com o envolvimento do consórcio do projeto UNEXUP, um projeto que pretende implantar um novo serviço de mapeamento de minas, baseado numa nova classe de robots subaquáticos autónomos com capacidade para explorar até mil metros de profundidade, obtendo informação relevante como o estado estrutural e mapas tridimensionais.
O projeto UNEXUP é financiado pelo EIT Raw Materials em cerca de 2.9M€. Termina em dezembro de 2022 e, além do INESC TEC, inclui na lista de parceiros a Universidade de Miskolc (líder do projeto) e UNEXMIN GeoRobotics, Hungria; La Palma Research Centre e Universidade Politécnica de Madrid, Espanha; Resources Computing International Ltd (4dcoders), Reino Unido; Universidade de Tampere, Finlândia; e Serviço Geológico da Eslovénia, Eslovénia.
Veja também
Em destaque
-
Multimédia
SMART Play: LEGO quer dar mais vida às construções com blocos “inteligentes” -
App do dia
Bloop: a plataforma portuguesa que junta compras e redes sociais num só lugar -
Site do dia
Tenha acesso a todos os assistentes de IA num só local com o ChatLLM Teams -
How to TEK
Como tirar partido do Wi-Fi 7 no Windows 11 para acelerar a ligação à Internet?
Comentários